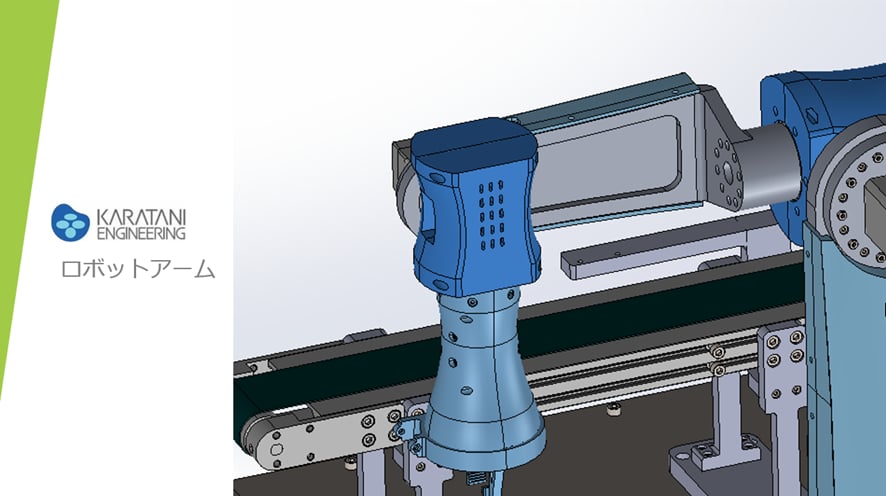
弊社では小型垂直多関節ロボットの開発に着手しています。6軸のサーボモーターで稼働しており、先端のグリップアームを変更することで搬送や組立等幅広い工程に導入できます。人間の腕のような形状で自由度が高いことも特徴です。